
Urban Air Mobility (UAM) offers a vision of efficient, on-demand air transportation that avoids ground traffic and congestion. But achieving commercial-scale UAM faces a significant challenge: current airspace management approaches weren’t designed for the high-frequency, low-altitude operations that UAM requires. The airspace used by UAM must accommodate a high density of operations, but doing so under today’s flight rules and airspace structures may not be possible without hitting the limits of what the air traffic control (ATC) system can safely accommodate.
SkyGrid and Wisk’s new white paper, Enabling Scalable Urban Air Mobility Through Automated Flight Rules, focuses on how Automated Flight Rules (AFR) can support the airspace integration of low-altitude UAM and their safe and efficient scaling beyond the constraints of the current airspace system, and outlines how novel automation can enable safe, high-density UAM operations.
Scaling UAM requires new conflict management automation, new airspace structures where automation safely separates aircraft, and new flight rules like AFR that define how aircraft should use this automation. In the new envisioned airspace structure, referred to as Class X airspace, an Automated Traffic Management System (ATMS) separates UAM aircraft, enabling structured, high-density operations without increasing ATC workload.
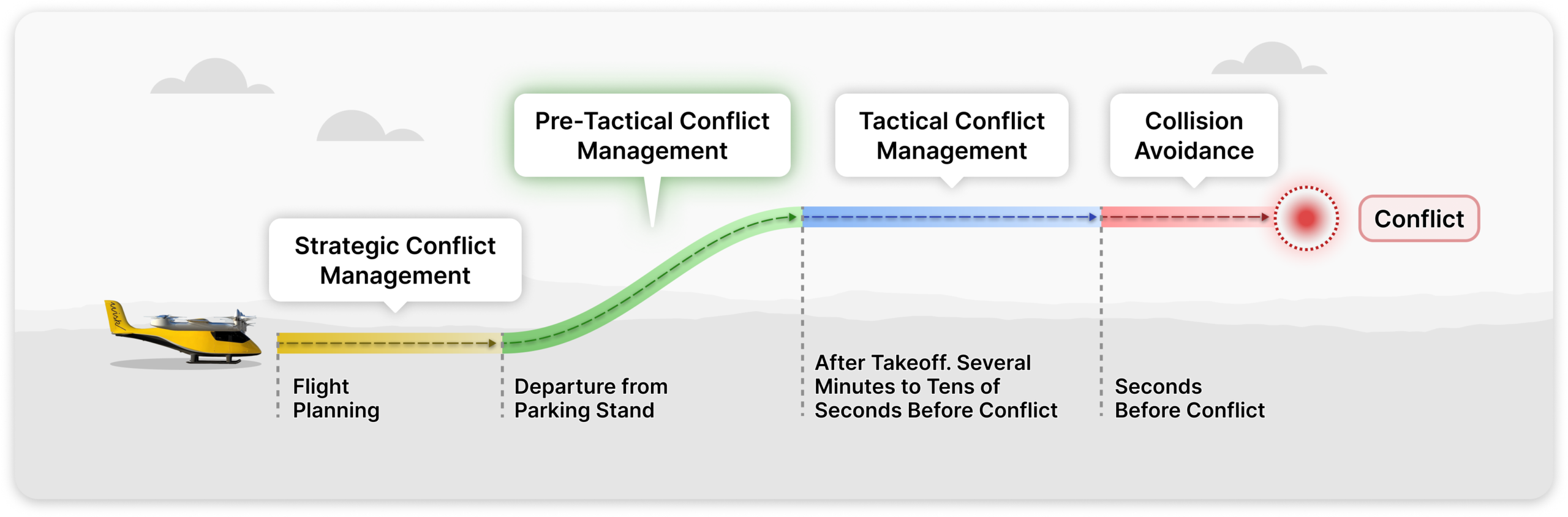
Conflict Management framework proposed for UAM operations in Class X airspace
Conflict Management is automated in distinct phases. Strategic conflict management conditions overall traffic flow to make in-flight separation manageable through demand-capacity balancing and operational intent validation, with actions taken while aircraft are still on the ground. Pre-tactical conflict management follows, implementing actions that ensure aircraft are properly spaced at the time of takeoff.
Pre-Tactical Conflict Management: Organizing Traffic Before Takeoff
Pre-tactical conflict management is the process of implementing adjustments to an aircraft’s operational intent after it has left its parking stand but before takeoff, in response to real-time flow management constraints. It is primarily achieved through departure metering (i.e., adjusting takeoff times) but may also include modifications to the aircraft’s route and cruise speed.
While strategic conflict management sets up the overall traffic pattern, pre-tactical conflict management fine-tunes it in real time.
Leveraging Departure Metering Through SkyGrid’s System
Once a UAM aircraft is ready for departure, the ATMS is responsible for issuing a departure authorization that accounts for multiple factors:
- Separation from other traffic at the departure vertiport: Departing aircraft must be properly sequenced around other inbound and outbound aircraft.
- Sequencing along the planned route: Aircraft must be properly spaced as they follow UAM routes.
- Spacing at the arrival vertiport: The departure of aircraft must be timed so that flights arrive at their destination vertiports in well-spaced intervals.
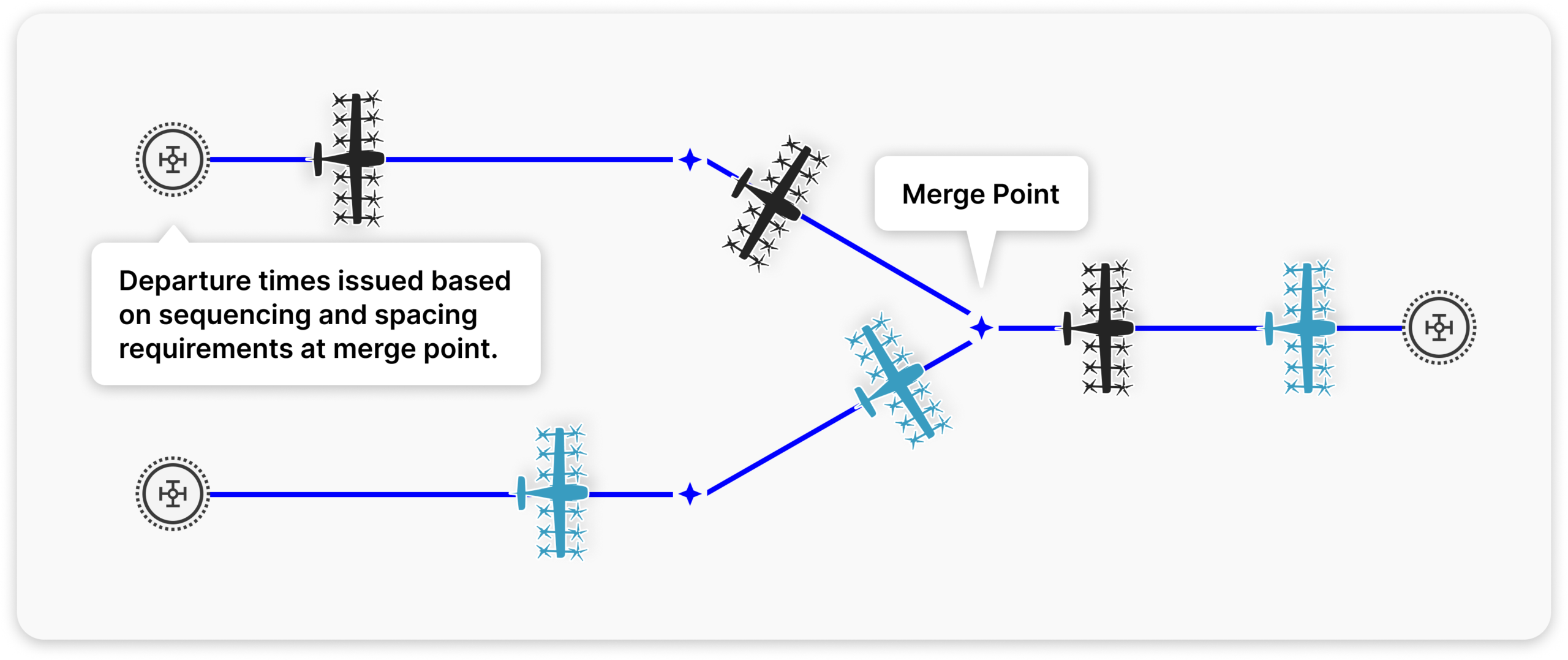
The ATMS will issue departure authorizations based on the need for separation from inbound and outbound aircraft at the departure vertiport and based on sequencing and spacing objectives along the flight route.
Consider a common scenario: multiple UAM routes converge onto a shared approach segment before landing. Without coordination, aircraft from different routes could arrive at the merge point simultaneously, creating conflict. The ATMS solves this through departure metering, holding some aircraft on the ground slightly longer to ensure they arrive at the merge point in proper sequence with appropriate spacing. By controlling when aircraft depart, the ATMS shapes the entire flow from the start, a more efficient and feasible approach than trying to adjust trajectories in flight.
Departure metering becomes particularly important when UAM operations interface with traditional ATC-controlled airspace, such as a Class B airport. When a UAM flight is expected to land at a vertiport located in this airspace, the ATMS coordinates with the Air Navigation Service Provider (ANSP). The ATMS uses data from the ANSP to meter departures in support of ATC traffic flow objectives.
For example, a UAM aircraft might approach a Class B airport alongside conventional jet traffic. The ATMS meters UAM departures from Class X airspace to support ATC’s separation requirements. This ensures the UAM aircraft doesn’t depart until it will fit smoothly into the arrival sequence without disrupting other traffic or requiring ATC intervention.
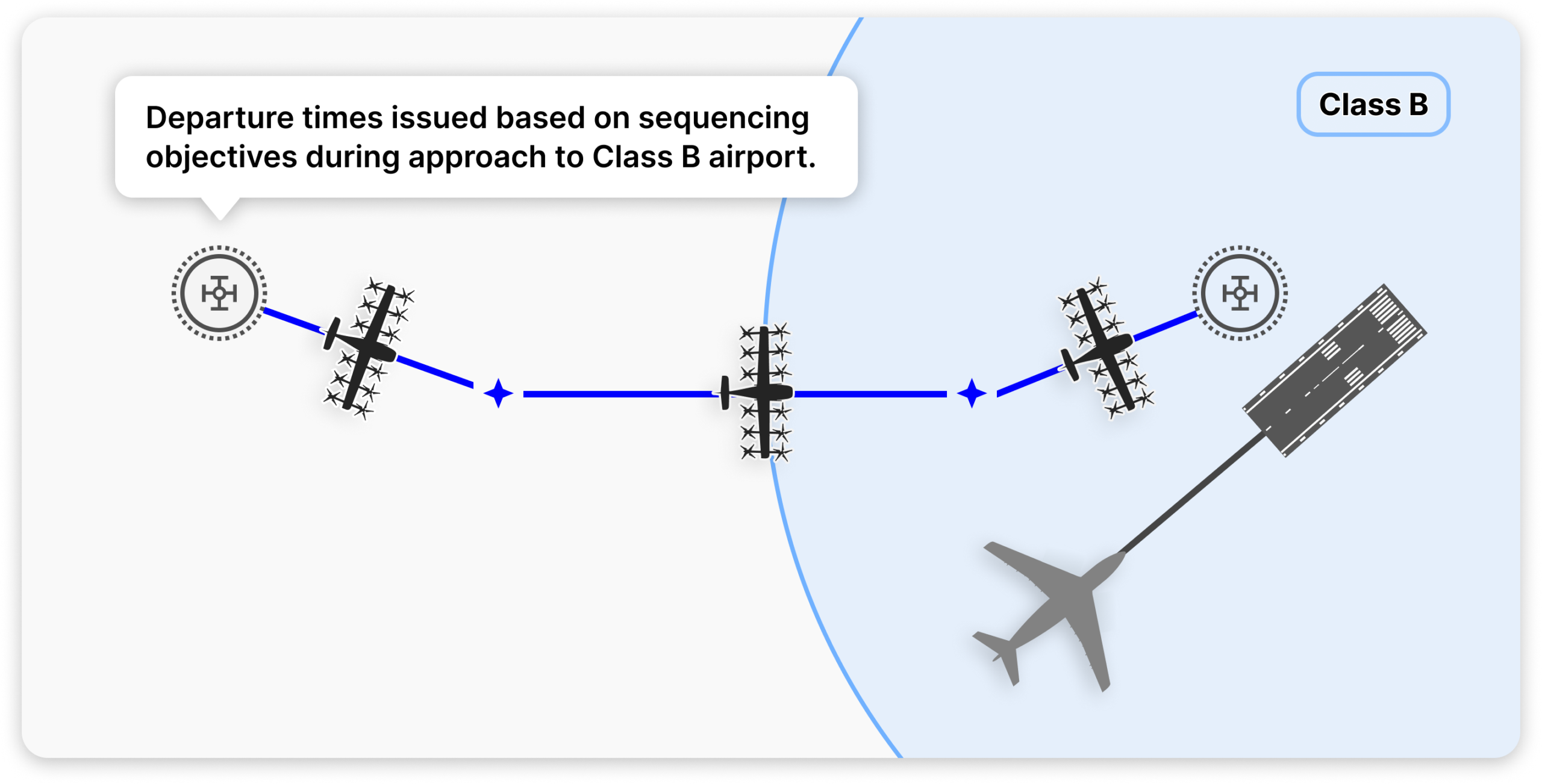
When departing from a vertiport located in Class X airspace and landing at a Class B airport, UAM aircraft will be metered by the ATMS based on the sequencing objectives of the ATC in charge of the Class B.
The ATMS handles the detailed timing and sequencing within Class X airspace while supporting ATC’s management of the surrounding airspace.
Why Pre-Tactical Conflict Management Matters
For short UAM flights, departure metering serves as the primary method for sequencing and spacing aircraft in Class X airspace. Short flights and energy constraints mean aircraft have limited opportunity to adjust trajectories in flight without significant inefficiencies. Controlling departure timing ensures aircraft are already in the correct sequence before takeoff, with any timing changes validated against capacity constraints to prevent new conflicts elsewhere in the system.
By the time a UAM aircraft takes off under AFR, it has been strategically planned and pre-tactically sequenced. The result is a flight that requires minimal adjustments in the air, allowing subsequent conflict management layers to focus on exceptions rather than routine coordination.
Learn more about automated conflict management and enabling scalable UAM in our new AFR white paper.